水平参差
不同助教对仪器操作、异常判断和讲解尺度不完全一致。


Project Snapshot
项目构建了一套自主研发的机器人实验助教系统,以“物理具身智能”为基石, 以“领域专家大脑”为核心,以“人机协同教学”为场景,将标准化实验操作、现场答疑和过程数据记录连接成闭环。
Why It Matters
近几年,在大学物理实验课堂的教学中,不断反映出一个关键问题:实验课最需要及时、稳定、标准一致的现场指导, 但人力助教很难长期覆盖所有学生、所有台位和所有异常情形。
不同助教对仪器操作、异常判断和讲解尺度不完全一致。
实验现场学生多、问题密集,助教难以同时巡视和答疑。
电学、光学、理化实验中的风险动作需要持续监控。
过程性表现、操作规范性和纠错轨迹难以客观记录。
Four Roles
以示波器实验为例,复现实验仪器调节、信号源设置、光路调整等标准操作。
以示波器实验为例,结合课程知识库回答波形、触发、读数等现场问题,并可扩展到其他实验现象。
以示波器实验为例,通过视觉和传感器识别不规范连接、异常状态与潜在风险。
以示波器实验为例,记录实验过程数据,为过程性评价和个性化反馈提供依据。
System Architecture
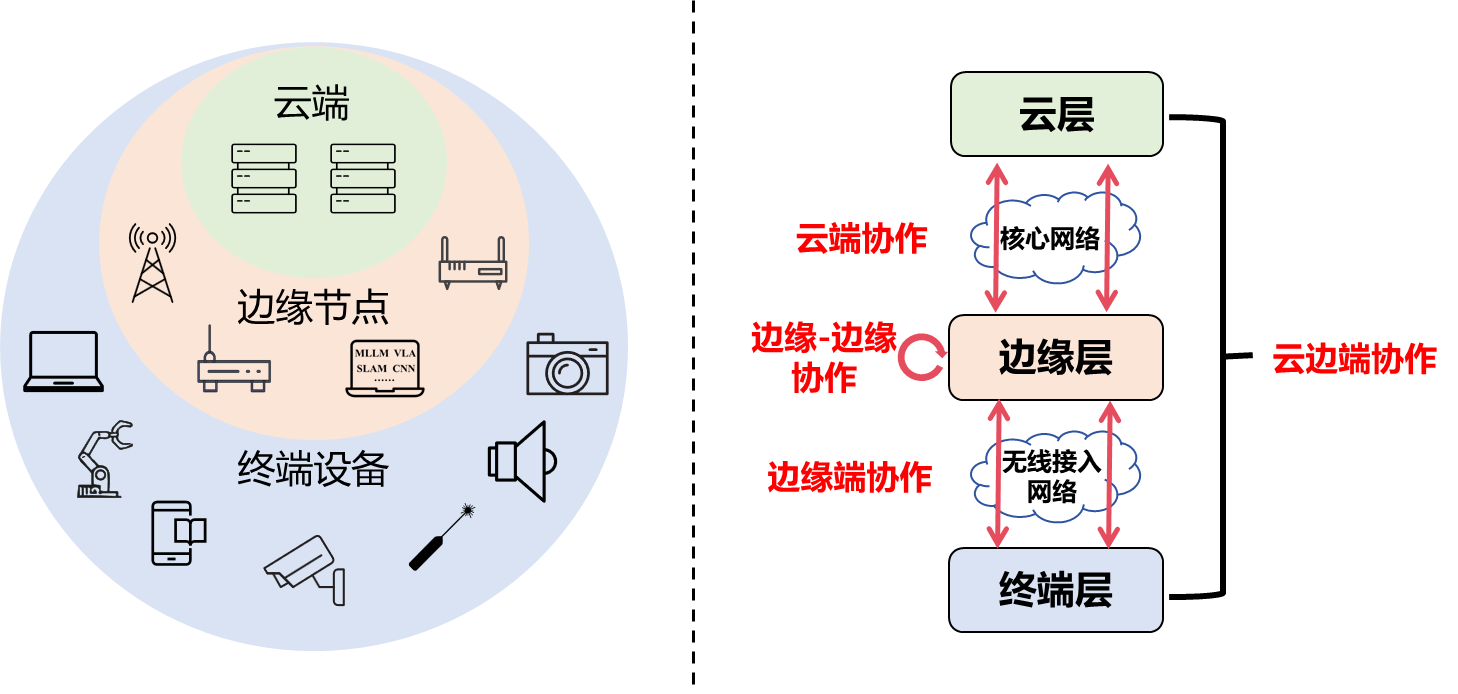
系统把课程知识、实验操作技能和机器人执行能力分层组织:云端沉淀垂直领域大模型与知识图谱, 边端负责多模态感知和数据采集,终端机器人完成实体操作与现场交互。
大学物理实验知识图谱、课程语料、答疑记录和大模型推理。
RGB / 深度相机、光电传感、触觉反馈共同理解仪器状态。
机械臂、底盘、腰部升降与低层控制模块执行原子技能。
Atomic Skill Library
以示波器实验为典型示例,“请演示如何测量信号频率”会被拆解为定位仪器、识别旋钮、调节时基、 稳定触发、读取波形等原子技能;同样的任务拆解方法可迁移到其他理工科实验,再由机器人运动控制和实时视觉反馈闭环执行。
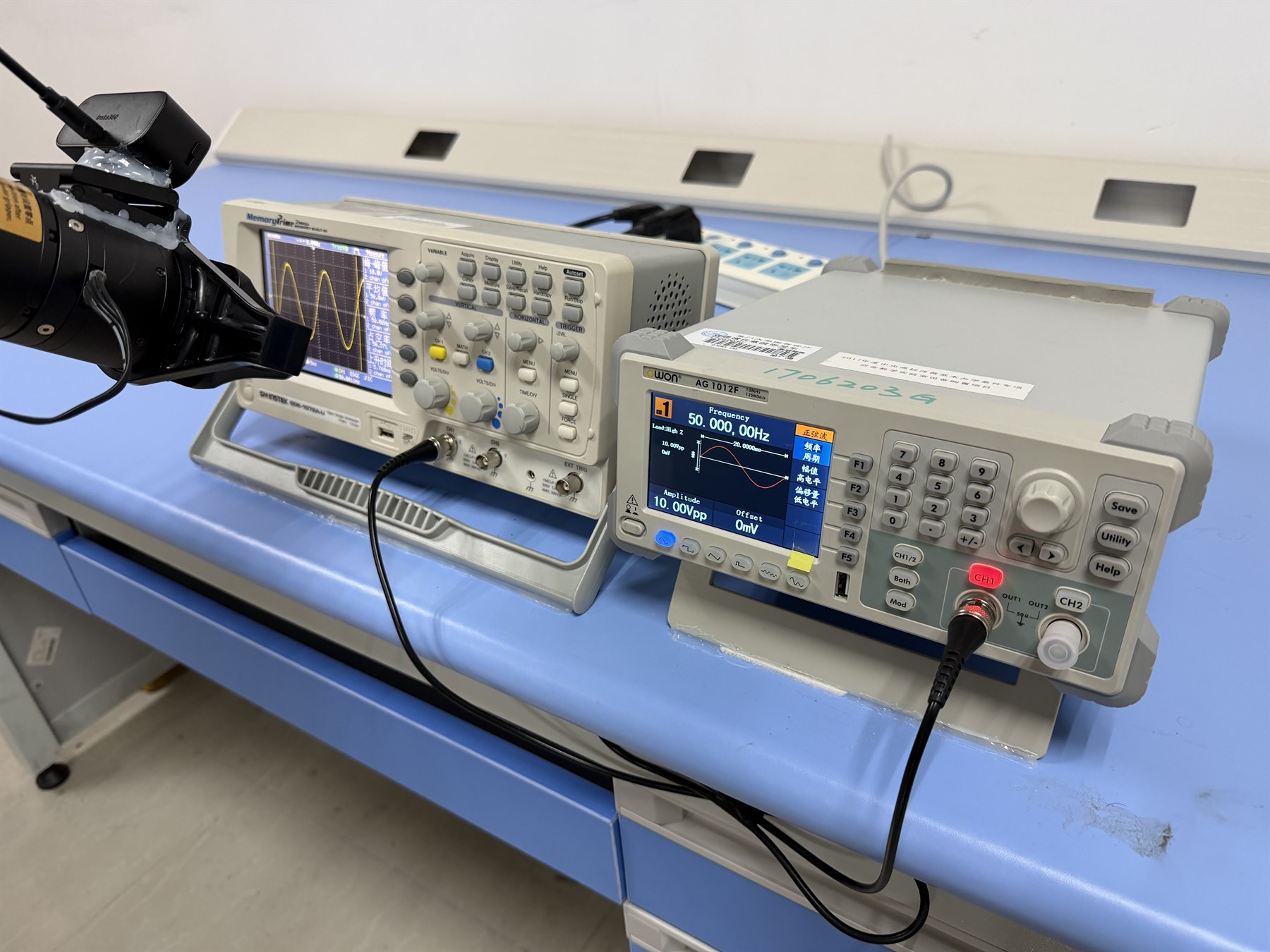
Robot Evolution
项目先用第一代机器人以示波器实验为例,验证“AI + 机械臂 + 仪器操作”的可行性, 再迭代为更轻量、更贴近课堂的第二代平台,提升交互、感知与部署适配能力,并面向更多理工科实验场景扩展。
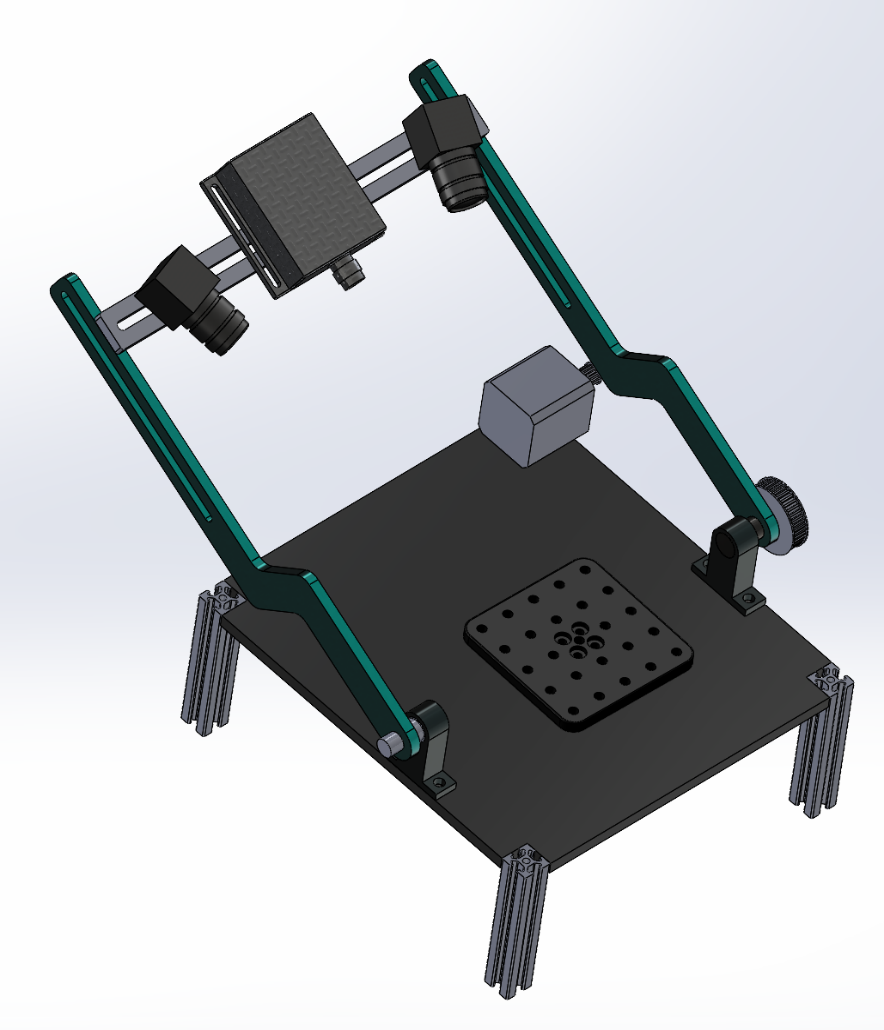
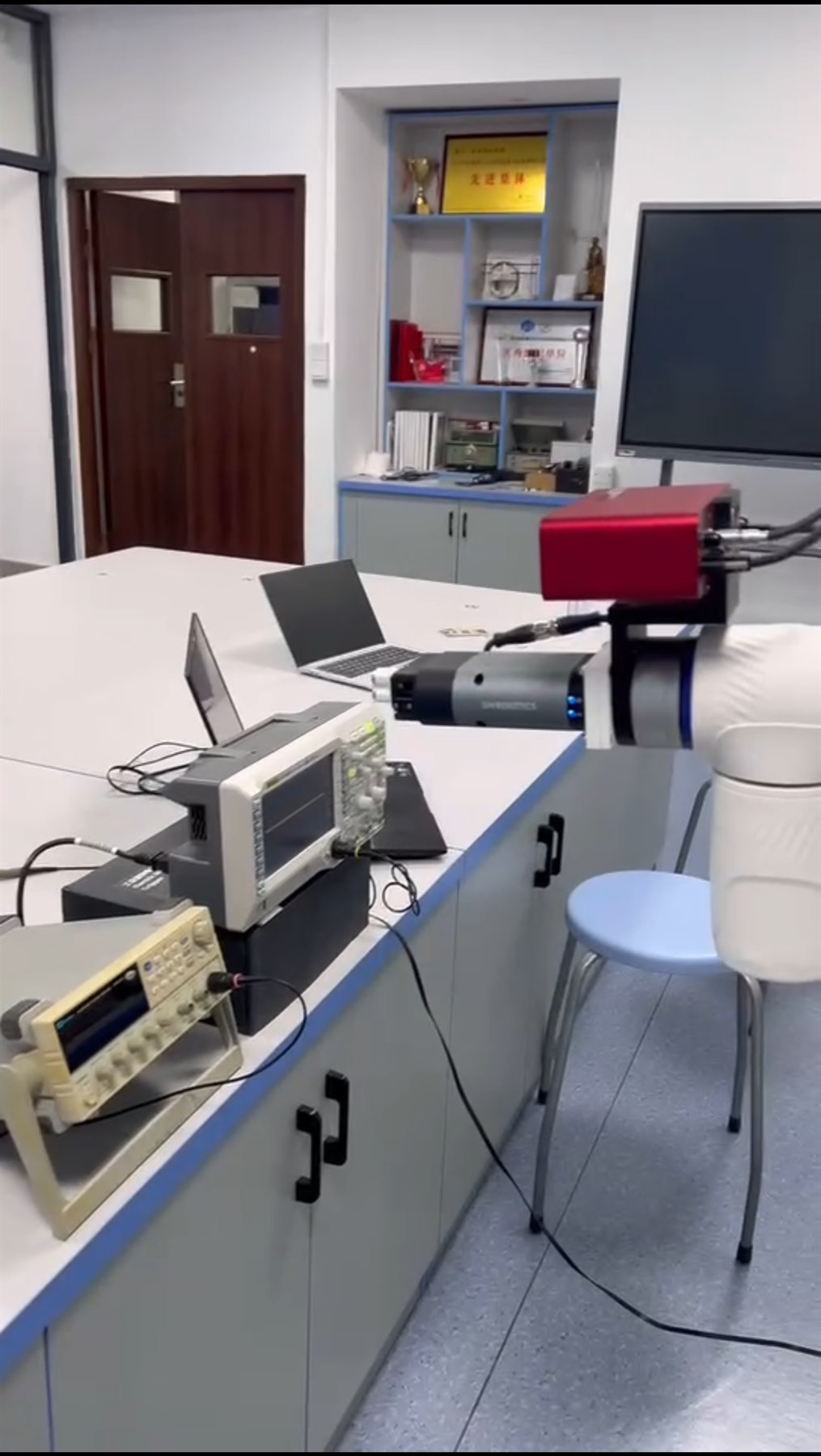
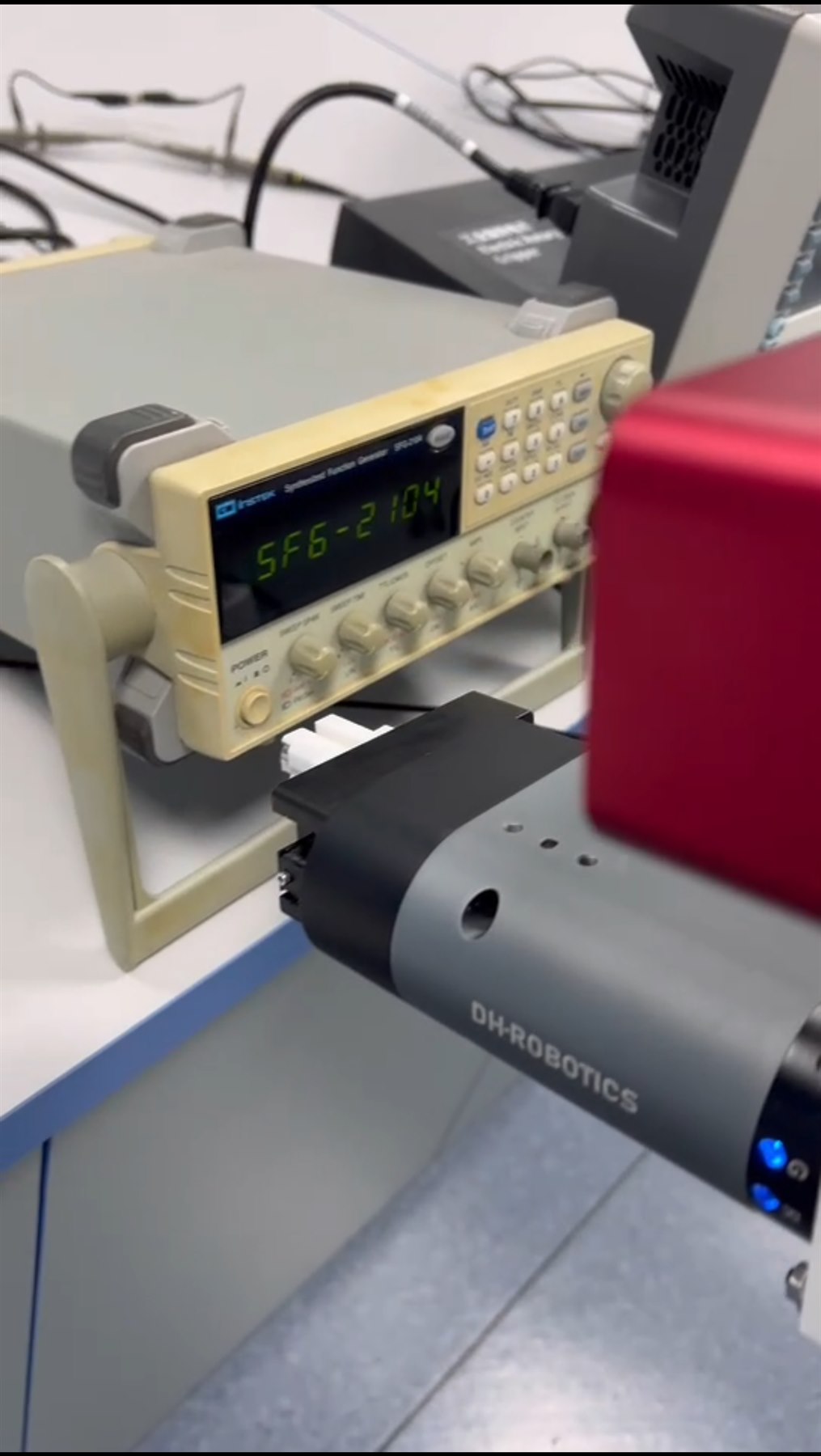
Generation 01
第一代设计以示波器/信号源操作为例聚焦核心闭环:机械臂靠近实验仪器、读取和调节仪器状态, 配合大模型进行实验现象解释,为实现演示带教、巡视答疑和仪器坐标映射奠定基础。
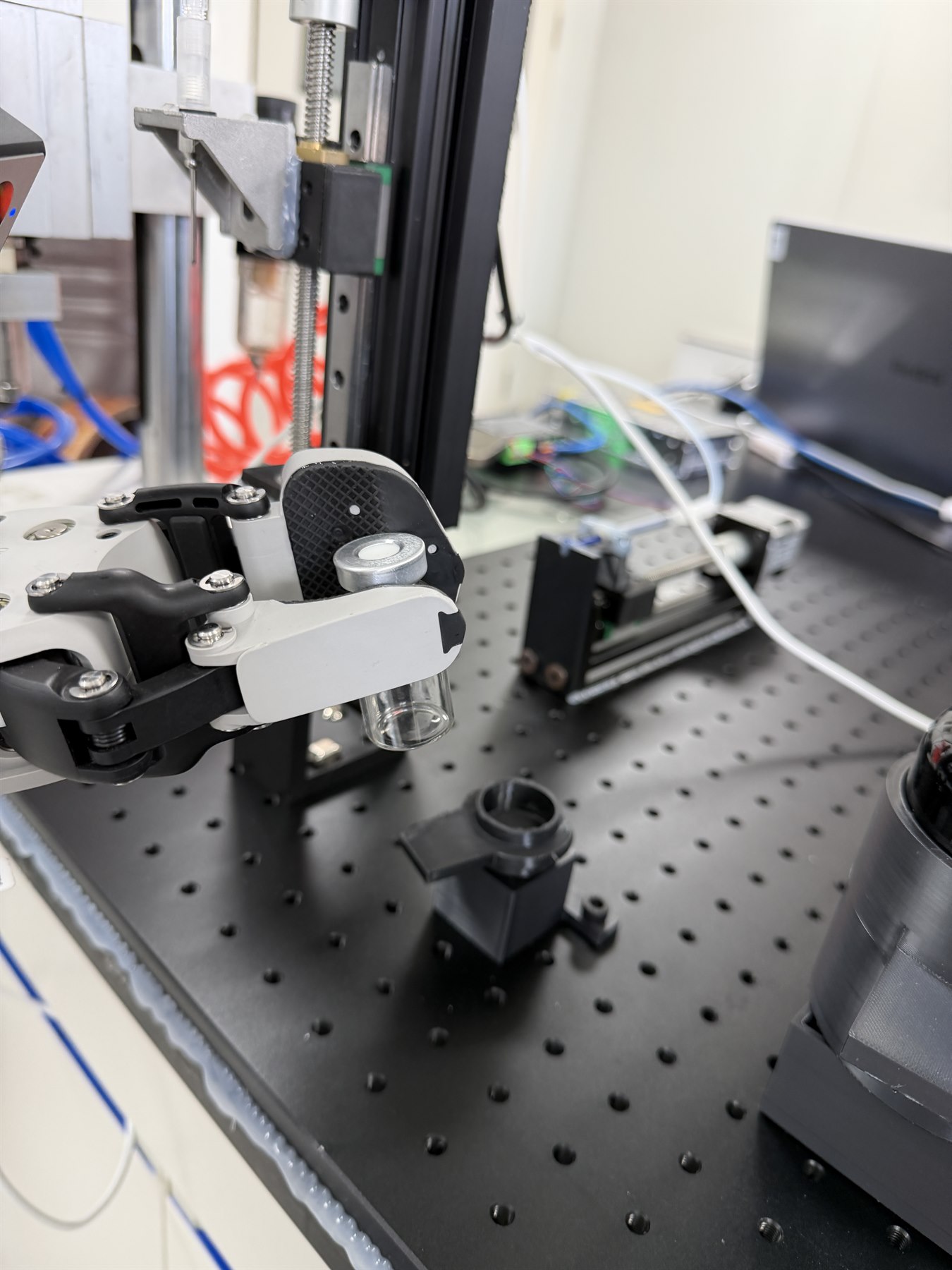
Generation 02
第二代机器人强化了轻量化底盘、大行程腰部、高灵活机械臂、 原子技能库、多维传感反馈和课程友好交互;以示波器实验为例验证后,面向真实课堂中的持续巡视与主动纠偏继续扩展。


Teaching Data
以示波器实验为例,项目沉淀了其中的高频问题:李萨如图形调试、波形不显示、两条直线、 触发准位、占空比、信号源输出电压等。机器人助教将这些问题映射到仪器状态、 原理解释和操作步骤,形成可复用、可拓展到更多实验主题的课程知识库。
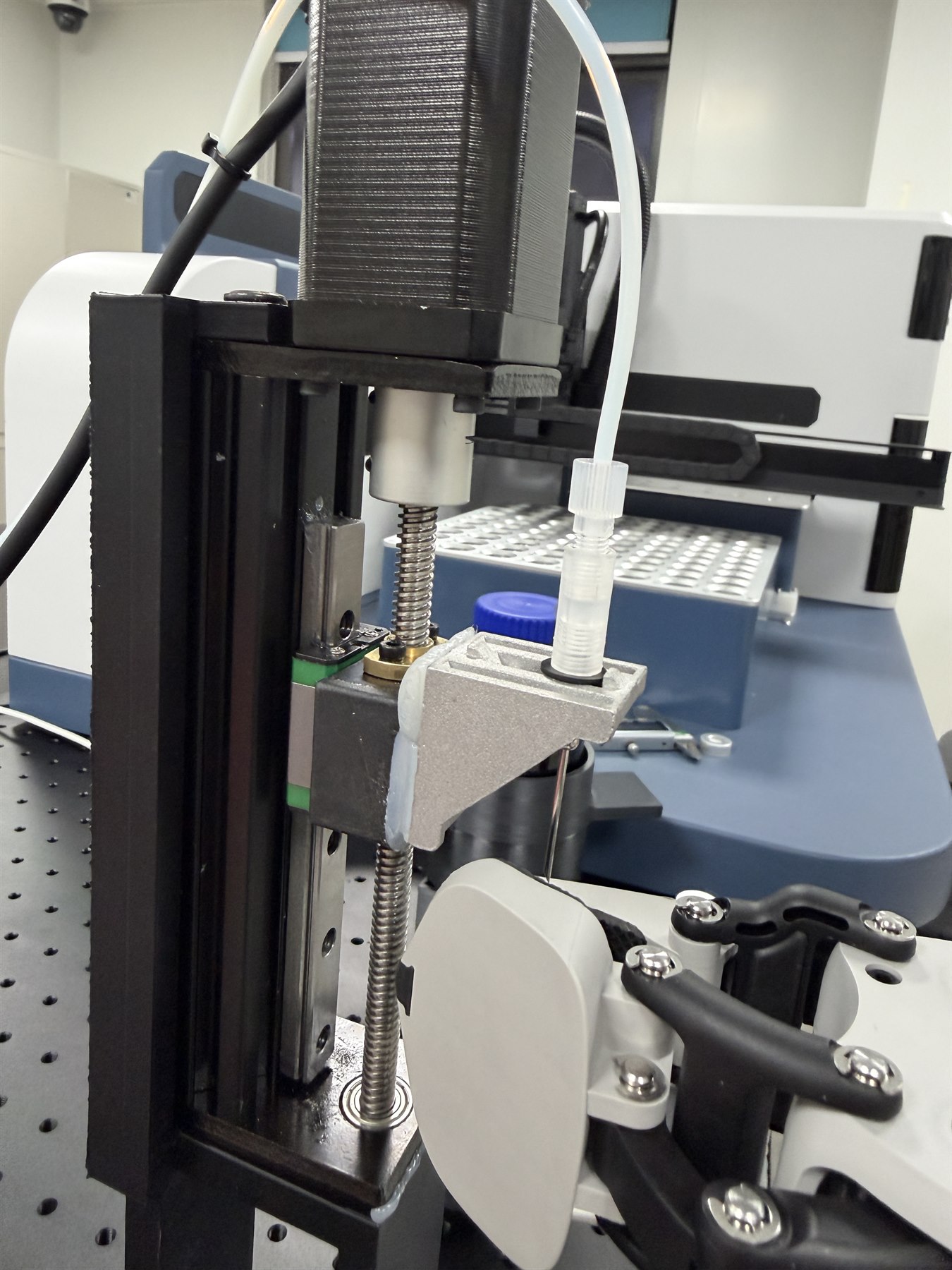
Technology Transfer
厦门市公安局司法鉴定中心“理化实验具身智能机器人操作系统”沿用本项目的 “大模型 + 具身机器人 + 多模态感知”核心框架,将教学端能力迁移为规范操作辅助、 安全风险防控、鉴定流程标准化与专家经验固化。

Outcomes & Roadmap
项目下一阶段将横向拓展到化学、生物、工程训练等操作性课程, 纵向形成“操作性知识代际传承平台”,并通过低代码实验构建器降低教师部署门槛。
构建理工科实验教学 AI 助教矩阵,覆盖更多实验课程。
沉淀标准操作、名师经验与异常处置,形成可复现知识资产。
降低技术门槛,探索开源社区与可持续运营生态。